¿Qué es un motor síncrono y dónde se utiliza?
Los motores eléctricos síncronos (SD) no son tan comunes como los motores asíncronos de jaula de ardilla. Pero se usan donde se necesita un gran par y durante el trabajo frecuente sobrecarga. Además, este tipo de motor se usa cuando se necesita una gran potencia para impulsar los mecanismos, debido al alto factor de potencia y la capacidad de mejorar el factor de potencia de la red, lo que reducirá significativamente el costo de la electricidad y la carga en la línea. Qué es un motor síncrono, dónde se usa y cuáles son sus ventajas y desventajas que consideraremos en este artículo.
Definición y principio de acción.
En términos simples, un motor síncrono se llama motor eléctrico cuya velocidad de rotación del rotor (eje) coincide con la velocidad de rotación del campo magnético del estator.
Consideremos brevemente el principio de funcionamiento de un motor eléctrico de este tipo: se basa en la interacción del campo magnético del estator giratorio, que generalmente se crea mediante corriente alterna trifásica y el campo magnético constante del rotor.
El campo magnético constante del rotor es creado por el devanado de excitación o imanes permanentes. La corriente en los devanados del estator crea un campo magnético giratorio, mientras que el rotor en el modo de funcionamiento es un imán permanente, sus polos se precipitan a los polos opuestos del campo magnético del estator. Como resultado, el rotor gira sincrónicamente con el campo del estator, que es su característica principal.
Recordemos que motor de inducción la velocidad de rotación del estator MP y la velocidad de rotación del rotor difieren en la cantidad de deslizamiento, y su característica mecánica se "joroba" con un pico durante el deslizamiento crítico (por debajo de su velocidad de rotación nominal).
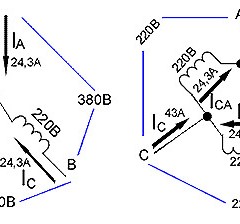
La velocidad con la que gira el campo magnético del estator se puede calcular utilizando la siguiente ecuación:
N = 60f / p
f es la frecuencia de la corriente en el devanado, Hz, p es el número de pares de polos.
En consecuencia, la velocidad de rotación del eje de un motor síncrono está determinada por la misma fórmula.
La mayoría de los motores eléctricos de CA utilizados en la producción están hechos sin imanes permanentes, pero con un devanado de excitación, mientras que los motores de CA síncronos de baja potencia están hechos con imanes permanentes en el rotor.
La corriente al devanado de campo es suministrada por anillos y un conjunto de cepillo. A diferencia de un motor eléctrico de colector, donde se utiliza un colector (un conjunto de placas dispuestas longitudinalmente) para transmitir corriente a una bobina giratoria, los anillos se montan en sincronizado a través de un extremo del estator.
Los excitadores de tiristores, a menudo llamados "VTE" (por el nombre de una de las series de tales dispositivos de producción doméstica) son actualmente la fuente de excitación de corriente continua.Anteriormente, se utilizaba el sistema de excitación generador-motor, cuando se instalaba un generador en el mismo eje con el motor (también es un excitador), que resistencias corriente aplicada al devanado de campo.
El rotor de casi todos los motores de CC síncronos se realiza sin un devanado de excitación y con imanes permanentes, aunque en principio son similares a los LED de CA, son muy diferentes en términos de cómo se conectan y controlan desde las máquinas trifásicas clásicas.
Una de las características principales de un motor eléctrico es una característica mecánica. Ella sincroniza motores cerca de una línea recta horizontal. Esto significa que la carga en el eje no afecta su velocidad (hasta que alcanza algún valor crítico).
 motores asíncronos yb) síncronos")
Esto se logra precisamente debido a la excitación de corriente continua; por lo tanto, el motor eléctrico síncrono mantiene perfectamente revoluciones constantes bajo cargas cambiantes, sobrecargas y caídas de voltaje (hasta cierto límite).
A continuación puede ver el símbolo en el diagrama de la máquina síncrona.

Diseño del rotor
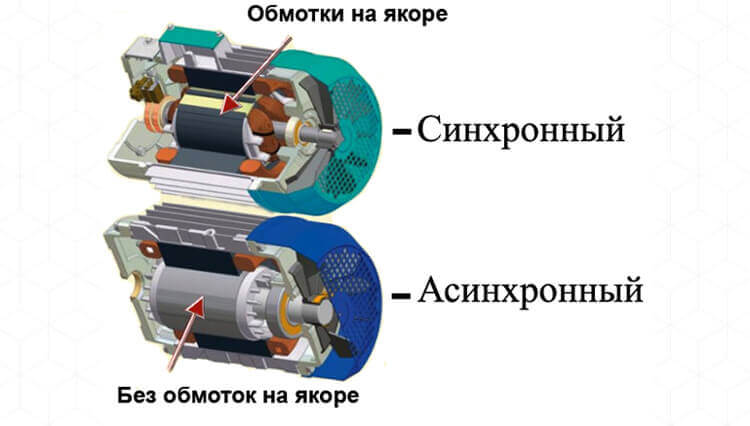
Como cualquier otro, un motor eléctrico síncrono consta de dos partes principales:
- Estator Los devanados se encuentran en él. También se llama un ancla.
- Rotor. Se le han instalado imanes permanentes o un devanado de excitación. También se le llama inductor, debido a su propósito: crear un campo magnético).
Para suministrar corriente al devanado de campo, se instalan 2 anillos en el rotor (dado que la excitación es corriente continua, se suministra "+" a uno de ellos y "-" al otro). Los cepillos están unidos al portaescobillas.

Los rotores de los motores de CA síncronos son de dos tipos, según el propósito:
- Explícitamente polar. Los postes (bobinas) son claramente visibles. Usar a bajas velocidades y una gran cantidad de polos.
- Implícito: parece un espacio en blanco redondo, en la ranura en la que se colocan los cables de los devanados. Use a altas velocidades de rotación (3000, 1500 rpm) y una pequeña cantidad de polos.

Arranque síncrono del motor
Una característica de este tipo de máquinas eléctricas es que no puede simplemente conectarse a la red y esperar su lanzamiento. Además, para el funcionamiento del LED, no solo se necesita la fuente de la corriente de excitación, sino que también tiene un circuito de arranque bastante complicado.

El arranque se produce como en un motor de inducción, y para crear un momento de arranque, además del devanado de campo, se coloca un devanado adicional de “jaula de ardilla” en el rotor. También se llama un devanado de "amortiguación", ya que aumenta la estabilidad durante sobrecargas repentinas.
No hay corriente de excitación en el devanado del rotor en el arranque, y cuando acelera a una velocidad sub-síncrona (3-5% menos que síncrona), se aplica la corriente de excitación, después de lo cual oscilan la corriente del estator y el motor, entra en sincronismo y entra en el modo de operación.
Para limitar las corrientes de arranque de máquinas potentes, a veces reducen el voltaje en los terminales de los devanados del estator conectando un autotransformador o resistencias en serie.
Mientras la máquina síncrona arranca en modo asíncrono, las resistencias están conectadas al devanado de campo, cuya resistencia excede la resistencia del propio devanado en 5-10 veces. Esto es necesario para que el flujo magnético pulsante que surge bajo la acción de las corrientes inducidas en el devanado durante el arranque no disminuya la aceleración, y también para no dañar los devanados debido a la fem inducida en él.
Puntos de vista
Hay muchos tipos de máquinas de este tipo, el diseño de un motor de corriente alterna síncrona con bobinados de excitación, como el más común en la producción, se describió anteriormente. Hay otros tipos, como:
- Motores síncronos de imanes permanentes. Estos son varios motores eléctricos, como PMSM - motor síncrono de imán permanente, BLDC - Corriente continua sin escobillas y otros. Las diferencias entre las cuales consisten en el método de control y la forma de la corriente (sinusoidal o trapezoidal). También se denominan motores sin escobillas o sin escobillas.Utilizado en máquinas herramientas, modelos controlados por radio, herramientas eléctricas, etc. No funcionan directamente de corriente continua, sino a través de un convertidor especial.
- Motores paso a paso: motores sincrónicos sin escobillas, en los que el rotor mantiene con precisión la posición especificada, se utilizan para colocar la herramienta de trabajo en las máquinas CNC y para controlar varios elementos de los sistemas automáticos (por ejemplo, la posición de la válvula de mariposa en el automóvil). Consisten en un estator, en este caso, los devanados de excitación se encuentran en él, y un rotor, que está hecho de material magnéticamente blando o magnéticamente duro. Estructuralmente muy similar a los tipos anteriores.
- Reactivo.
- Histéresis.
- Histéresis reactiva.
Los últimos tres tipos de LED tampoco tienen cepillos, funcionan debido al diseño especial del rotor. Los LED reactivos distinguen tres de sus diseños: un rotor estratificado transversalmente, un rotor con polos distintos y un rotor estratificado axialmente. Una explicación del principio de su trabajo es bastante complicada y tomará una gran cantidad, por lo que la omitiremos. Tales motores en la práctica, es probable que se encuentren con poca frecuencia. Estas son principalmente máquinas de baja potencia utilizadas en automatización.

Ámbito de aplicación
Los motores síncronos son más caros que los asíncronos, además requieren una fuente adicional de excitación de corriente continua, lo que en parte reduce el ancho del alcance de este tipo de máquinas eléctricas. Sin embargo, los motores eléctricos síncronos se utilizan para conducir mecanismos donde las sobrecargas son posibles y se requiere un mantenimiento preciso de revoluciones estables.

Además, se usan con mayor frecuencia en el campo de las grandes capacidades: cientos de kilovatios y unidades de megavatios, y al mismo tiempo, el arranque y la parada son bastante raros, es decir, las máquinas funcionan durante todo el día durante mucho tiempo. Esta aplicación se debe al hecho de que las máquinas síncronas operan con cos и phi cerca de 1, y pueden entregar potencia reactiva a la red, lo que mejora el factor de potencia de la red y reduce su consumo, lo cual es importante para las empresas.
Ventajas y desventajas
En palabras simples, entonces cualquier automóvil eléctrico tiene sus pros y sus contras. Las ventajas de un motor síncrono son:
- Trabajan con cosPhI = 1, debido a la excitación de corriente continua, respectivamente, no consumen energía reactiva de la red.
- Durante la operación, con sobreexcitación, le dan potencia reactiva a la red, mejorando el factor de potencia de la red, la caída de voltaje y las pérdidas en ella, y aumenta el CM de los generadores de las plantas de energía.
- El momento máximo desarrollado en el eje del LED es proporcional a U, y para AD - U² (dependencia cuadrática del voltaje). Esto significa que el LED tiene buena capacidad de carga y estabilidad, que se conservan durante una caída de voltaje en la red.
- Como consecuencia de todo esto, la velocidad de rotación es estable durante sobrecargas y subsidencias, dentro de la capacidad de sobrecarga, especialmente con el aumento de la corriente de excitación.
Sin embargo, un inconveniente significativo de un motor síncrono es que su diseño es más complicado que el de un asíncrono con un rotor en cortocircuito; se necesita un excitador, sin el cual no puede funcionar. Todo esto conlleva un mayor costo en comparación con las máquinas asíncronas y dificultades en el mantenimiento y la operación.
Quizás las ventajas y desventajas de los motores síncronos terminan ahí. En este artículo, hemos intentado resumir información general sobre motores síncronos. Si tiene algo para complementar el material, escriba en los comentarios.
Materiales relacionados: